一、产品特点
供电电压:DC7-30V;
通信波特率:2400,4800,9600,19200,38400(默认9600,可以修改);
通信协议:支持标准modbus RTU &ASCII协议;
可以设置0-255个设备地址,可以通过软件设置。
二、产品功能
三、产品选型
型号 | modbus | RS232 | RS485 | USB | WiFi | 模拟量 |
DAM1400AI-YD-RS232 | ● | ● |
|
|
| 14 |
DAM1400AI-YD-RS485 | ● |
| ● |
|
| 14 |
四、主要参数
参数 | 说明 |
数据接口 | RS485、RS232 |
额定电压 | DC 7-30V |
电源指示 | 1路LED指示 |
输出指示 | 14路LED指示 |
温度范围 | 工业级,-40℃~85℃ |
尺寸 | 100*70*35mm |
安装方式 | 35mm卡轨安装 |
默认通讯格式 | 9600,n,8,1 |
波特率 | 2400,4800,9600,19200,38400 |
软件支持 | 配套配置软件、控制软件;
支持各家组态软件;
支持Labviewd等 |
重量 | 60g |
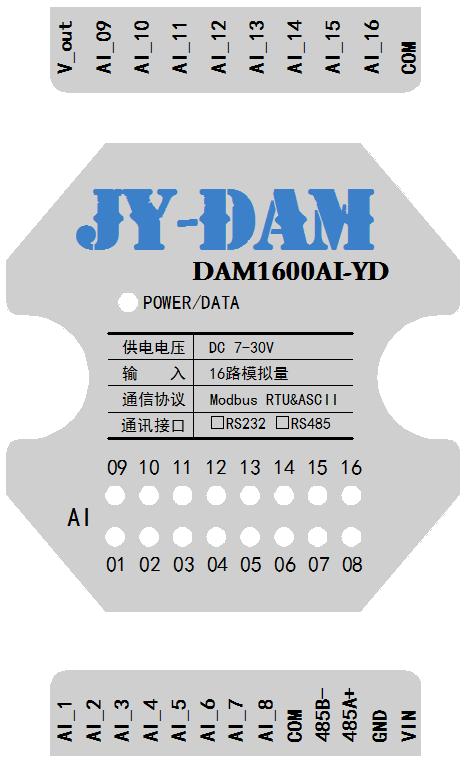
五、接口说明
VIN为供电电源正极,GND为供电电源负极。
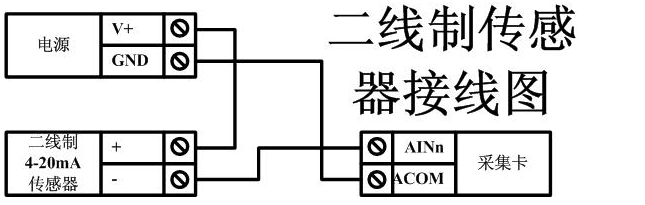
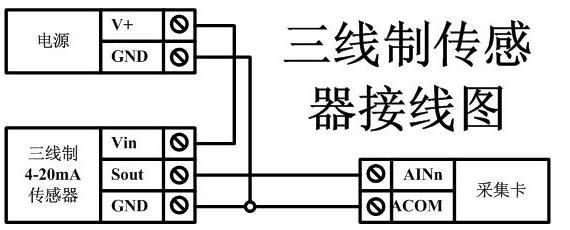
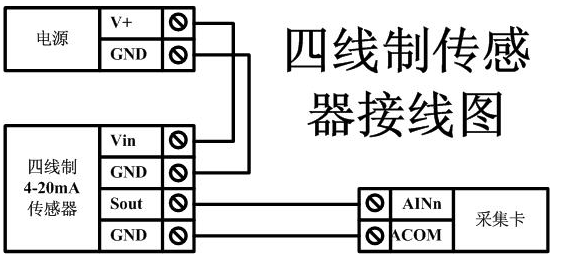
六、输入输出接线
模拟量接线示意图
二线制:
三线制:
四线制:
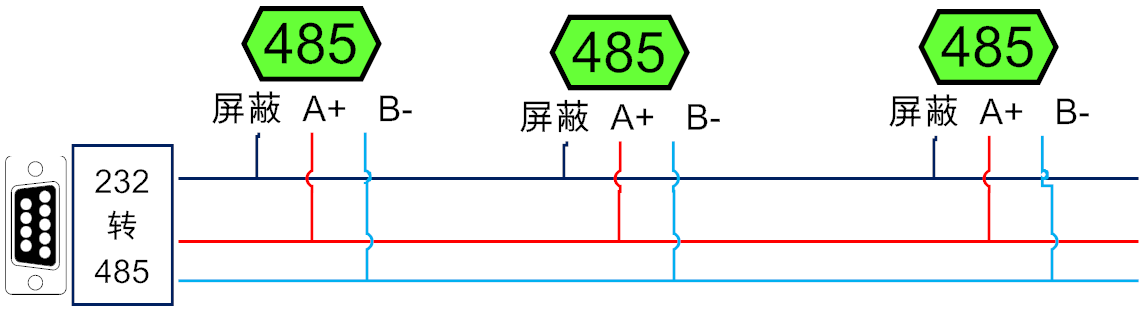
七、通讯接线说明
1、RS485级联接线方式
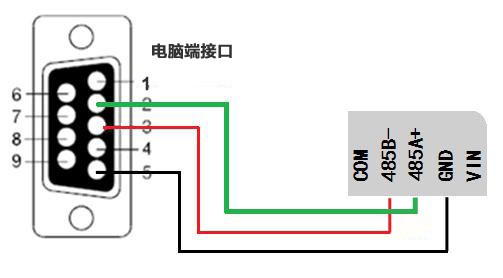
2、RS232接线连接方式
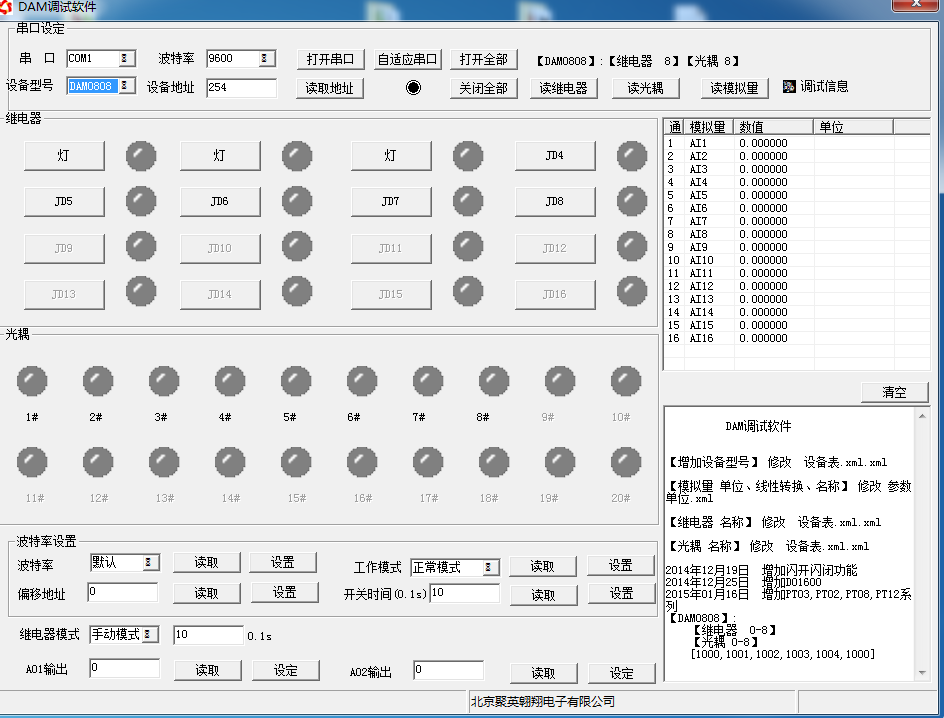
测试软件说明
1、软件界面
2、软件功能
九、工作模式功能及设置
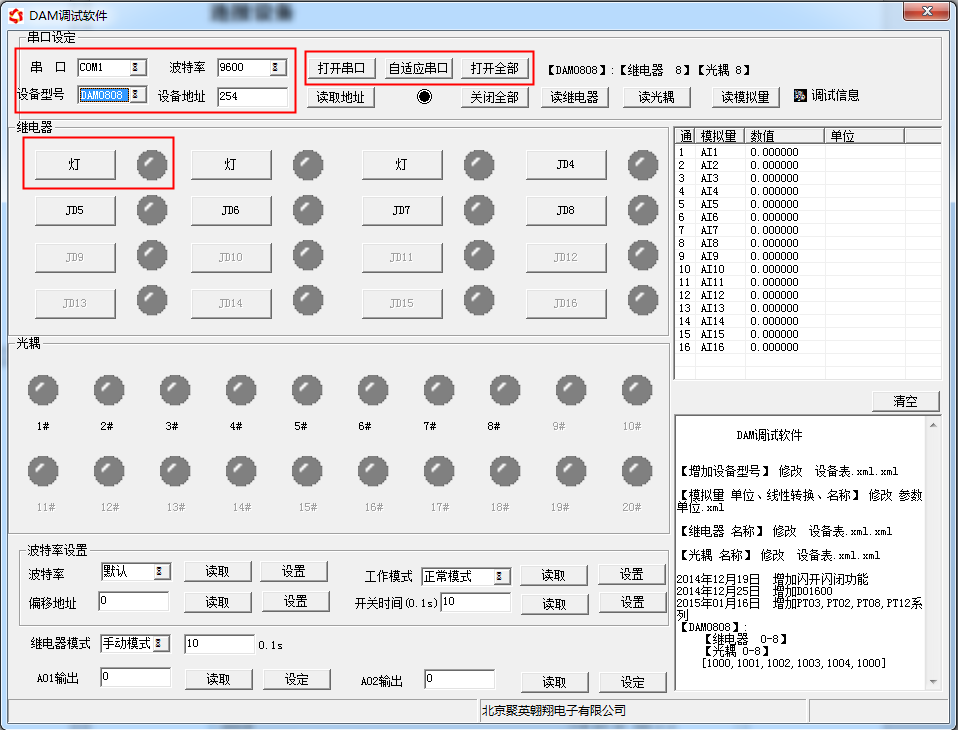
1、连接设备
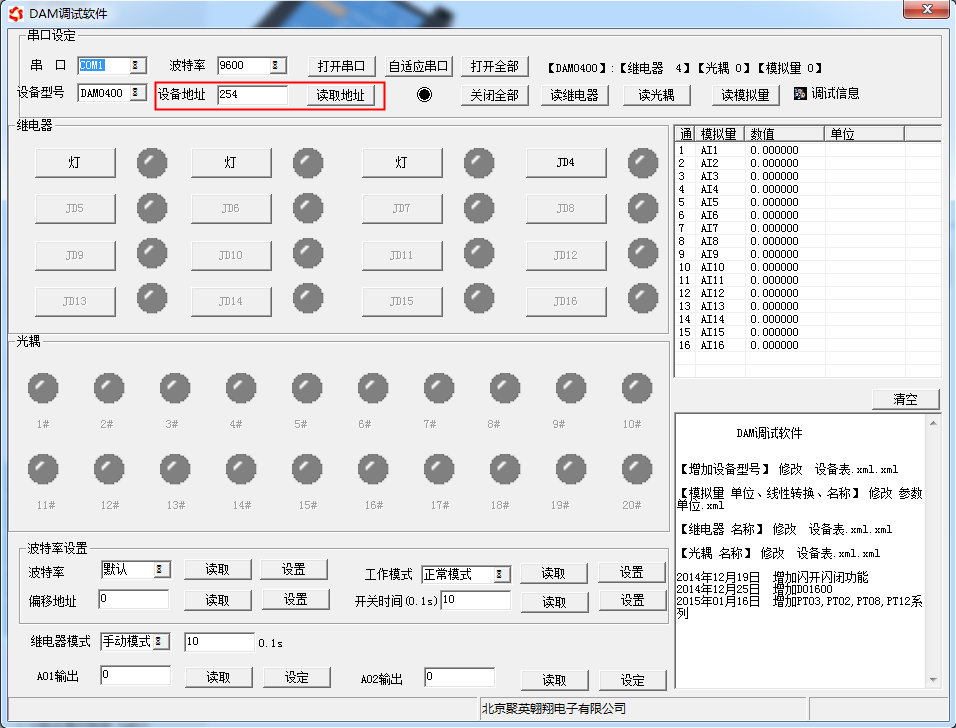
打开“聚英翱翔DAM调试软件”;串口设定栏:串口选择您电脑对应COM口,波特率选择设备默认波特率(9600)(未自己设置过波特率前),设备地址填写“254”(254为设备的广播地址),设备型号选择相对应型号,设置好以上设备的4个参数后点击打开串口,点击继电器按钮“JD1”若继电器反应则连接成功。
2、设备地址的更改方法
2.1、设备地址的介绍
本设备是没有拨码开关的设备,所以设备地址 = 偏移地址。
2.2、设备地址的读取
点击软件上方“读取地址”
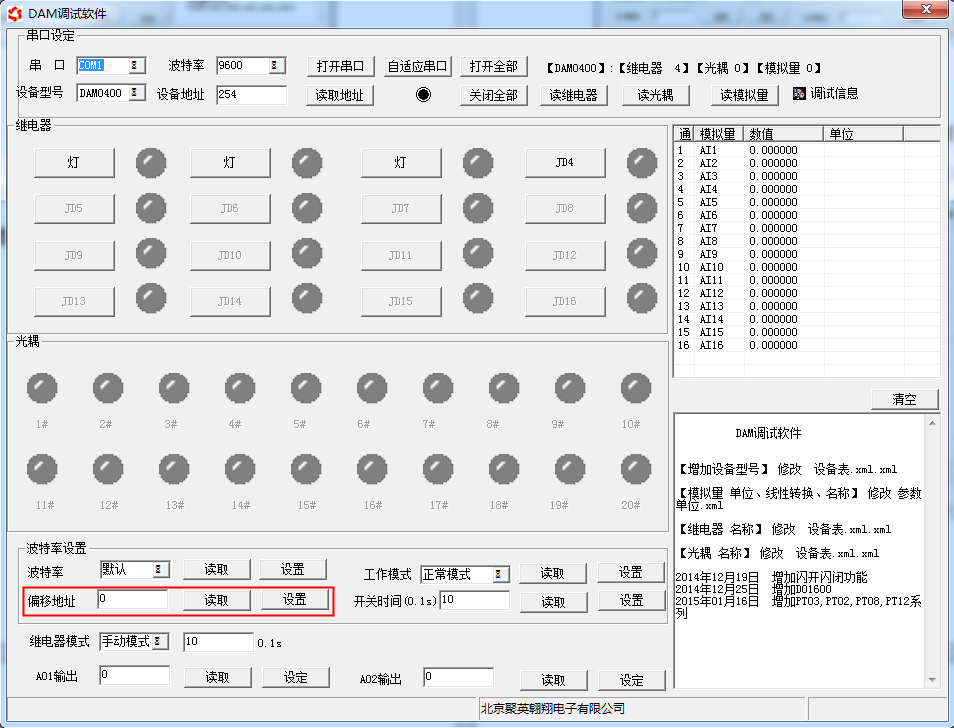
2.3、偏移地址的设定与读取
点击软件下方偏移地址后边的“读取”或“设置”来对设备的偏移地址进行读取或设置。
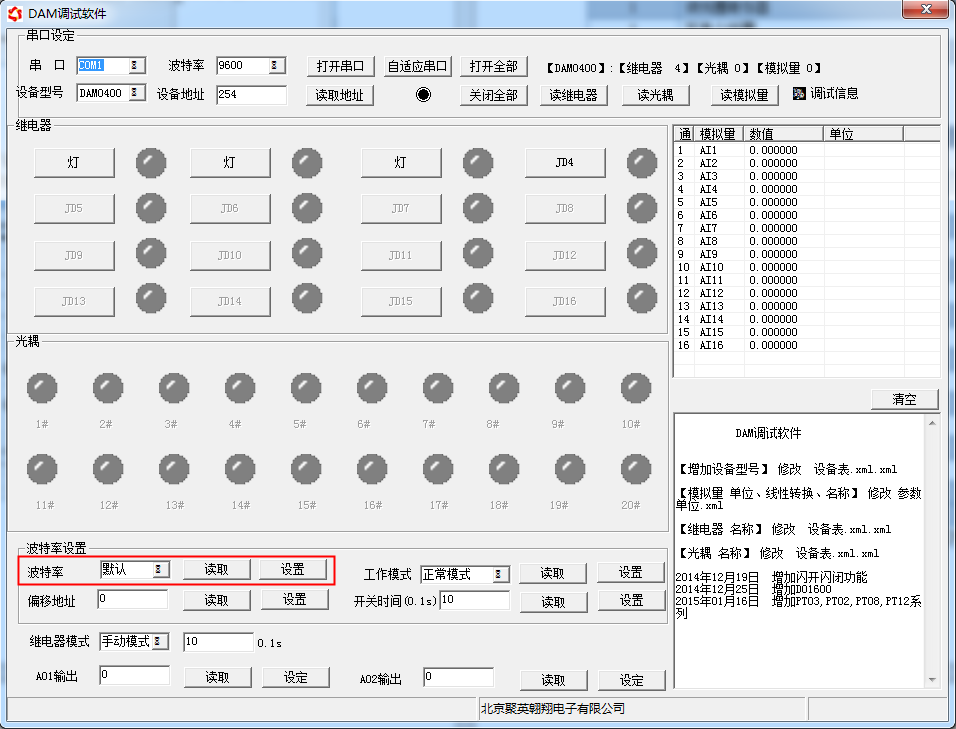
2.4、波特率的读取与设置
点击下方波特率设置栏的“读取”和“设置”就可以分别读取和设置波特率和地址,操作后需要重启设备和修改电脑串口设置。
十、开发资料说明
1、通讯协议说明
本产品支持标准modbus指令,有关详细的指令生成与解析方式,可根据本文中的寄存器表结合参考《MODBUS协议中文版》 即可。
Modbus协议中文版下载地址:http://www.juyingele.com.cn/software/software/Modbus POLL软件及使用教程.rar
本产品支持modbus RTU 格式。
2、Modbus寄存器说明
本控制卡主要为线圈寄存器,主要支持以下指令码:1、5、15
指令码 | 含义 |
1 | 读线圈寄存器 |
5 | 写单个线圈 |
15 | 写多个线圈寄存器 |
线圈寄存器地址表:
寄存器名称 |
| 寄存器地址 | 说明 |
线圈控制 |
线圈1 | 写线圈 1号指令码 | 00001 | 第一路继电器输出 |
线圈2 | 00002 | 第二路继电器输出 |
线圈3 | 00003 | 第三路继电器输出 |
线圈4 | 00004 | 第四路继电器输出 |
线圈5 | 00005 | 第五路继电器输出 |
线圈6 | 00006 | 第六路继电器输出 |
线圈7 | 00007 | 第七路继电器输出 |
线圈8 | 00008 | 第八路继电器输出 |
离散量输入 |
输入1 | 开关量 2号指令 | 10001 | 第一路输入 |
输入2 | 10002 | 第二路输入 |
输入3 | 10003 | 第三路输入 |
输入4 | 10004 | 第四路输入 |
输入5 | 10005 | 第五路输入 |
输入6 | 10006 | 第六路输入 |
输入7 | 10007 | 第七路输入 |
输入8 | 10008 | 第八路输入 |
模拟量输入 |
输入1 | 模拟量 4号指令 | 30001 | 第一路输入 |
输入2 | 30002 | 第二路输入 |
输入3 | 30003 | 第三路输入 |
输入4 | 30004 | 第四路输入 |
输入5 | 30005 | 第五路输入 |
输入6 | 30006 | 第六路输入 |
输入7 | 30007 | 第七路输入 |
输入8 | 30008 | 第八路输入 |
配置参数 |
通信波特率 | 保持寄存器 | 41001 | 见下表波特率数值对应表,默认为0,支持0-5,该寄存器同时决定RS232和RS485的通信波特率 |
备用 | 41002 | 备用,用户不可写入任何值。 |
偏移地址 | 41003 | 设备地址=偏移地址+拨码开关地址 |
工作模式 | 41004 | 用户可以使用,存储用户数据 |
延迟时间 | 41005 | 用户可以使用,存储用户数据 |
备注:
①:Modbus设备指令支持下列Modbus地址:
00001至09999是离散输出(线圈)
10001至19999是离散输入(触点)
30001至39999是输入寄存器(通常是模拟量输入) 40001至49999是保持寄存器(通常存储设备配置信息)
采用5位码格式,第一个字符决定寄存器类型,其余4个字符代表地址。地址1从0开始,如00001对应0000。
②:波特率数值对应表
数值 | 波特率 |
0 | 38400 |
1 | 2400 |
2 | 4800 |
3 | 9600 |
4 | 19200 |
5 | 38400 |
③:继电器状态,通过30002地址可以查询,也可以通过00001---00002地址来查询,但控制只能使用00001---00002地址。
30002地址数据长度为16bit。最多可表示16个继电器。
对应结果如下:
Bit | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
继电器位置 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 |
即 寄存器30009数据 的bit8 与寄存器00001的数据一样。
同理:光耦输入也是如此。寄存器30003的bit8、bit9 与寄存器10001、10002都对应到指定的硬件上。
寄存器地址按照PLC命名规则,真实地址为去掉最高位,然后减一。
参考资料:http://hi.baidu.com/anyili001/item/573454e6539f60afc10d75c9
3、指令生成说明
应用举例及其说明:本机地址除了拨码开关地址之外,还有默认的254为广播地址。当总线上只有一个设备时,无需关心拨码开关地址,直接使用254地址即可,当总线上有多个设备时通过拨码开关选择为不同地址,发送控制指令时通过地址区别。
注意:RS485总线可以挂载多个设备。
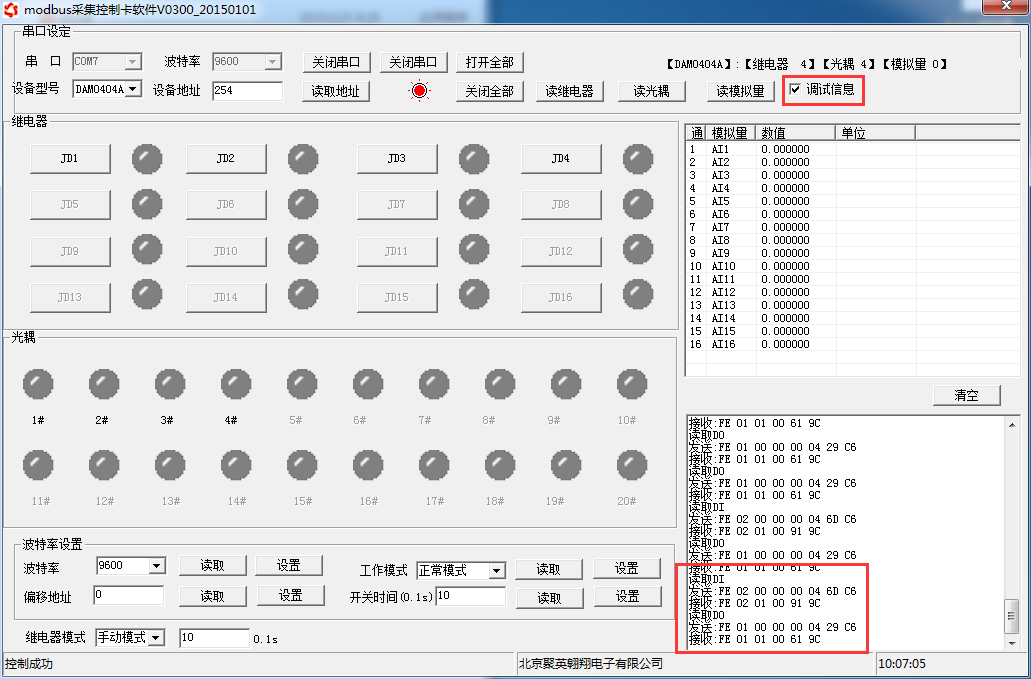
指令可通过“聚英翱翔DAM系列配置软件”,的调试信息来获取。
指令生成说明:对于下表中没有的指令,用户可以自己根据modbus协议生成
4、指令列表
查询第1路模拟量 | FE 04 00 00 00 01 25 C5 |
返回信息 | FE 04 02 00 00 AD 24 |
查询第2路模拟量 | FE 04 00 01 00 01 74 05 |
查询第3路模拟量 | FE 04 00 02 00 01 84 05 |
查询第4路模拟量 | FE 04 00 03 00 01 D5 C5 |
查询第5路模拟量 | FE 04 00 04 00 01 64 04 |
查询第6路模拟量 | FE 04 00 05 00 01 35 C4 |
查询第7路模拟量 | FE 04 00 06 00 01 C5 C4 |
查询第8路模拟量 | FE 04 00 07 00 01 94 04 |
查询第9路模拟量 | FE 04 00 08 00 01 A4 07 |
查询第10路模拟量 | FE 04 00 09 00 01 F5 C7 |
查询第11路模拟量 | FE 04 00 0A 00 01 05 C7 |
查询第12路模拟量 | FE 04 00 0B 00 01 54 07 |
查询第13路模拟量 | FE 04 00 0C 00 01 E5 C6 |
查询第14路模拟量 | FE 04 00 0D 00 01 B4 06 |
5、指令详解
查询模拟量
发送码:FE 04 00 00 00 01 25 C5
字段 | 含义 | 备注 |
FE | 设备地址 |
|
04 | 04指令 | 查询输入寄存器指令 |
00 00 | 起始地址 | 要查询的第一路模拟量寄存器地址 |
00 01 | 查询数量 | 要查询的模拟量数量 |
25 C5 | CRC16 |
|
模拟返回信息:
返回码:FE 04 02 00 00 AD 24
字段 | 含义 | 备注 |
FE | 设备地址 |
|
04 | 04指令 | 返回指令:如果查询错误,返回0x82 |
02 | 字节数 | 返回状态信息的所有字节数 |
00 00 | 查询的AD字 | 0x0227,即十进制551,为查询的模拟量的值 |
AD 24 | CRC16 |
|
















 官方微信
官方微信
 天猫店铺
天猫店铺
 京东店铺
京东店铺

 销售王经理
销售王经理

